Evaluated Architectures
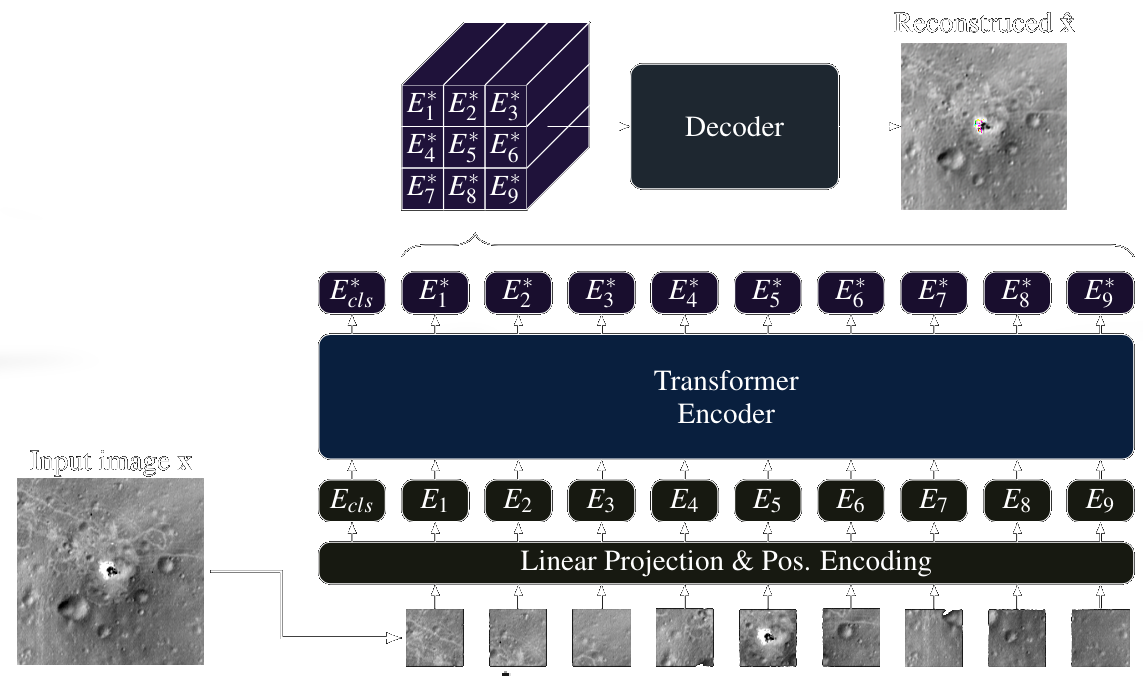
AnoViT
Vision Transformer Autoencoder
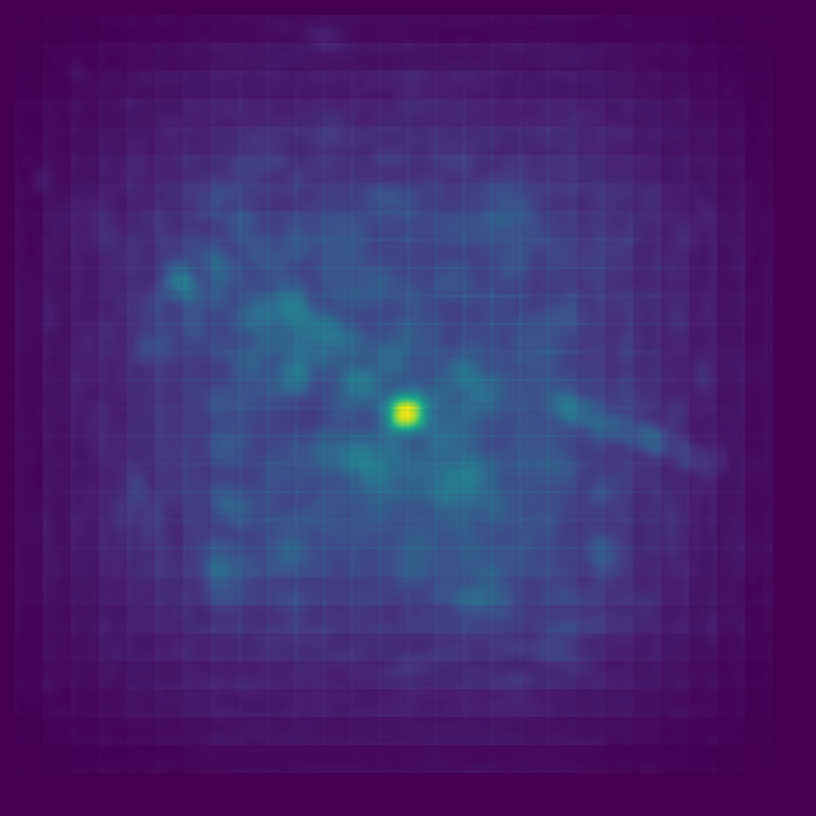
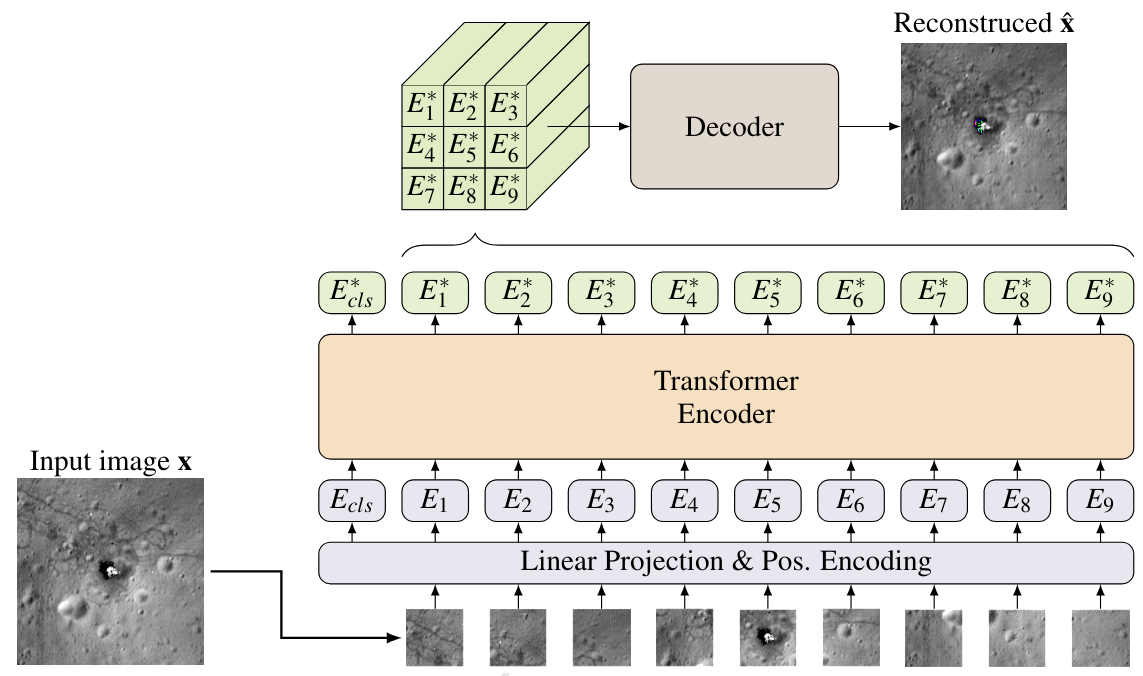
The AnoViT method uses an Autoencoder approach to detect anomalies. It uses a Vision Transformer (ViT) as an encoder, and the resulting features are used to reconstruct the input image using a Convolutional Neural Network (CNN) decoder. The reconstruction error reveals anomalous regions that the model has never encountered during training.
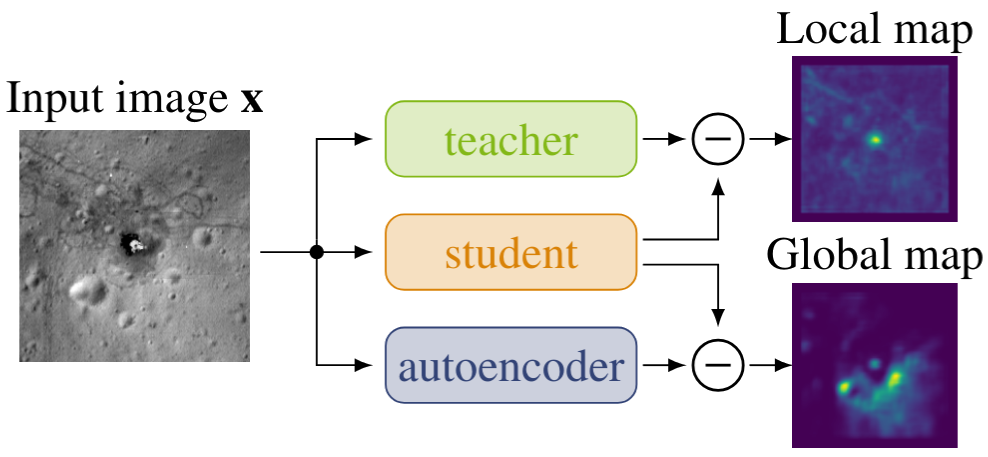
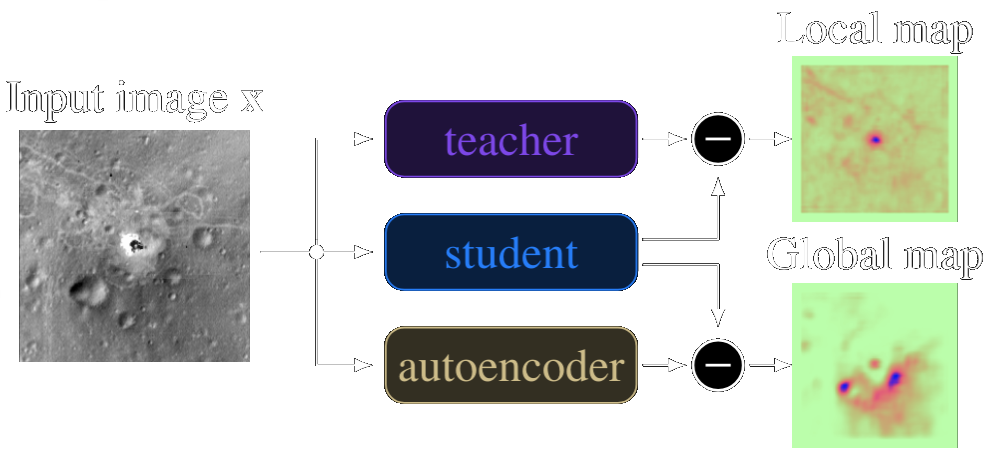
EfficientAD
Student-Teacher Framework
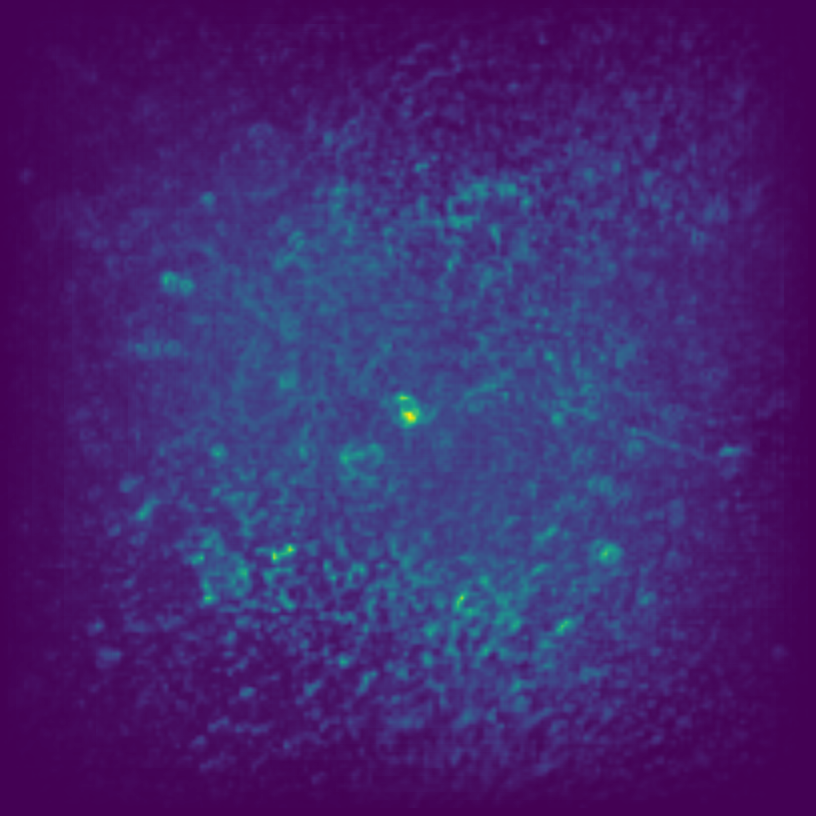
This approach uses a student-teacher framework along with an Autoencoder to identify anomalies at both local and global scales. A pre-trained teacher network provides feature targets; the student network learns to mimic these on normal data. During inference, significant differences between the student and teacher outputs are considered indicators of anomalies.
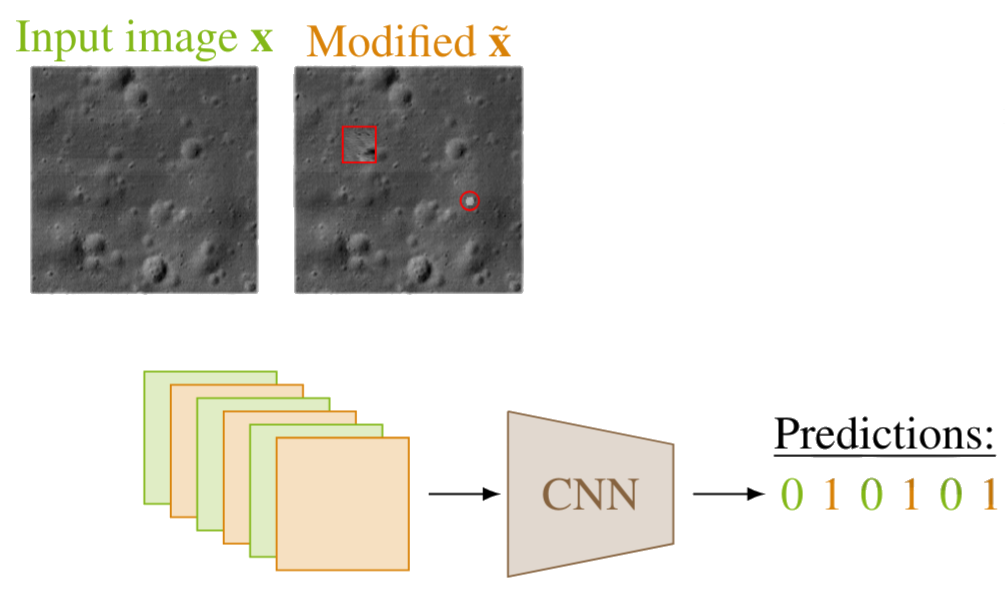
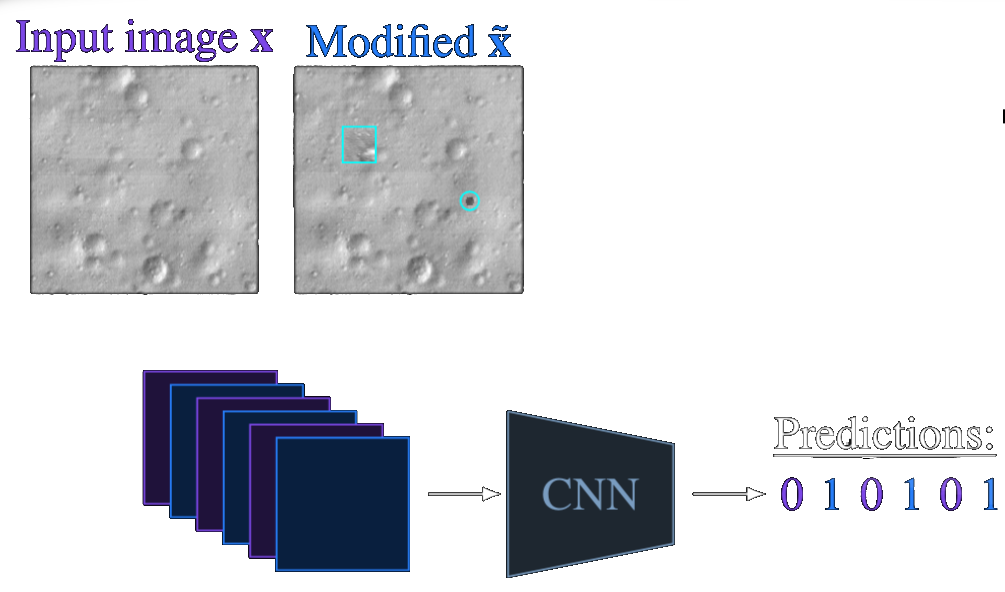
Cut&Paste
Synthetic Anomaly Generation
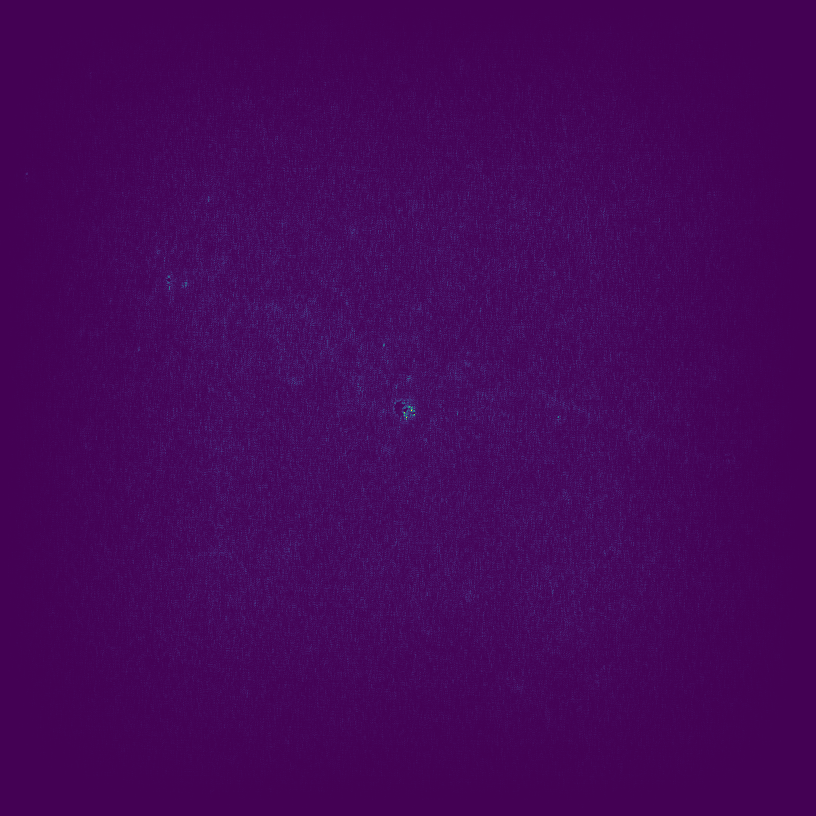
This method converts the unsupervised anomaly detection problem into an artificially constructed supervised classification task. Synthetic anomalies are generated by cutting patches from normal images and pasting them back with augmentations. It was trained with five different transformations including mean patch, whiten blob, darken blob, and a darken path transform.